Image-based Multi-agent Formation
Developed heterogeneous multi-agent leader-follower formation with image-based visual servoing. Validation conducted on physical platform.
Overview
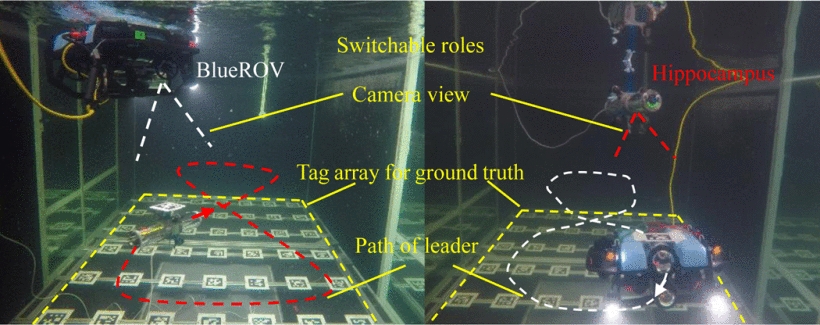
Developed image-based visual servoing switchable leader-follower control for heterogeneous multi-agent underwater robot system, using BlueROV2 and HippoCampus, result published in (Yao et al., 2023).
Collaborators
Dr. Daniel A Duecker from Hamburg University of Technology (now in Technical University of Munich), Nathalie Bauschmann and Thies L Alff from Hamburg University of Technology.



ICRA presentation video.