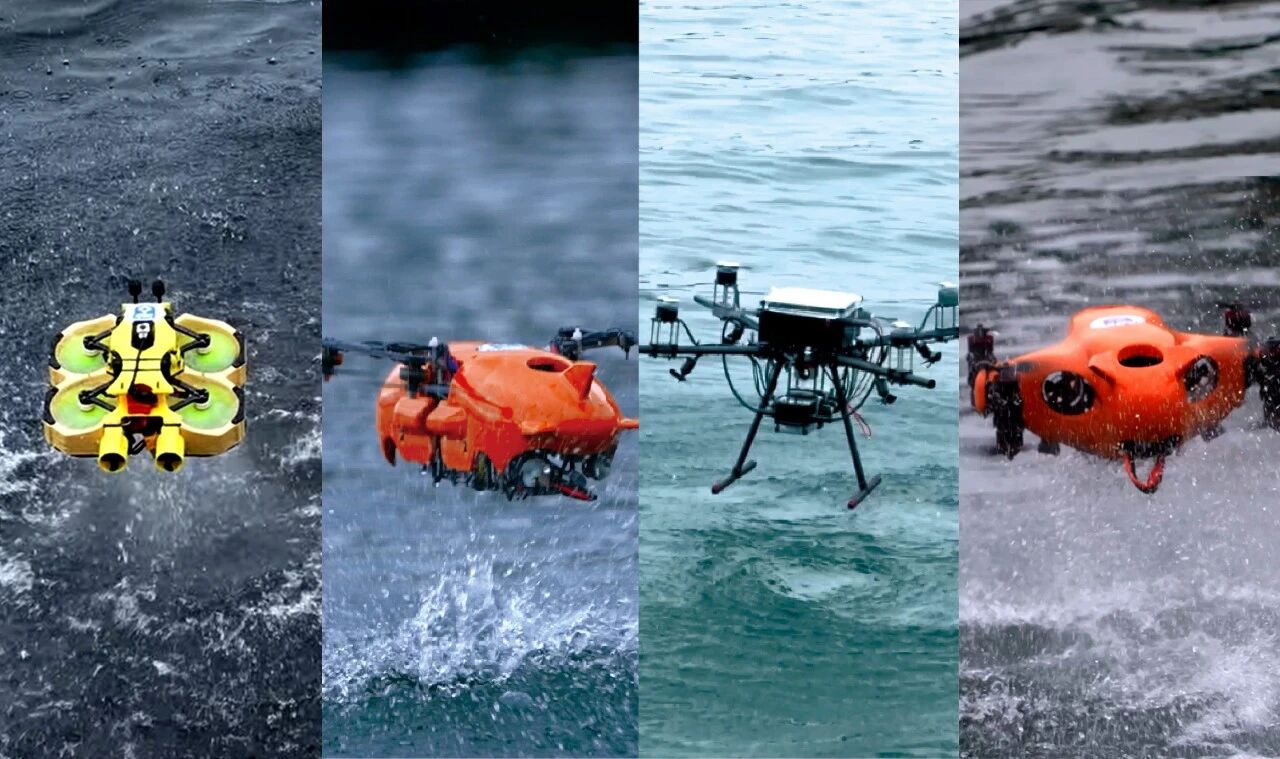
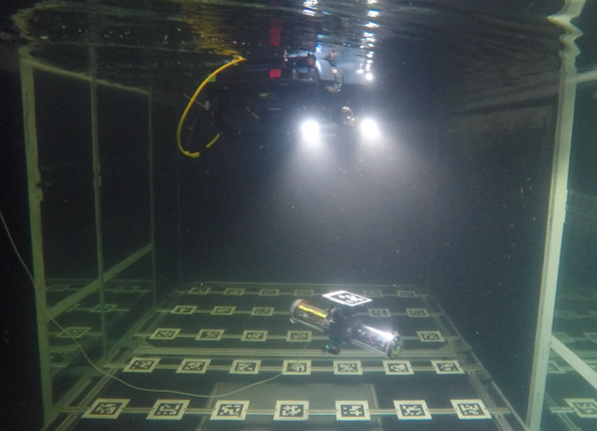
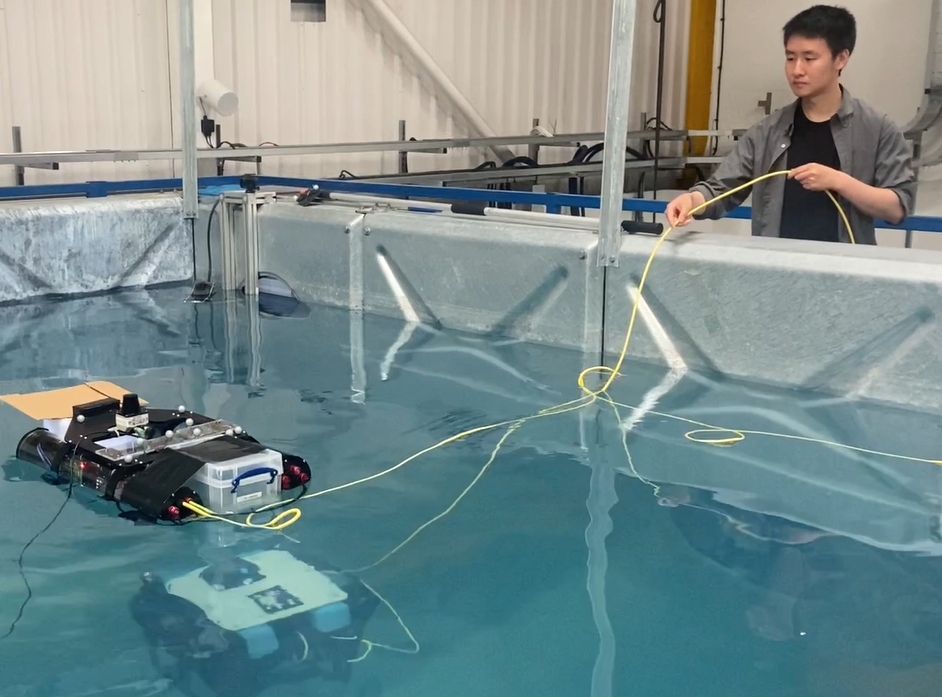
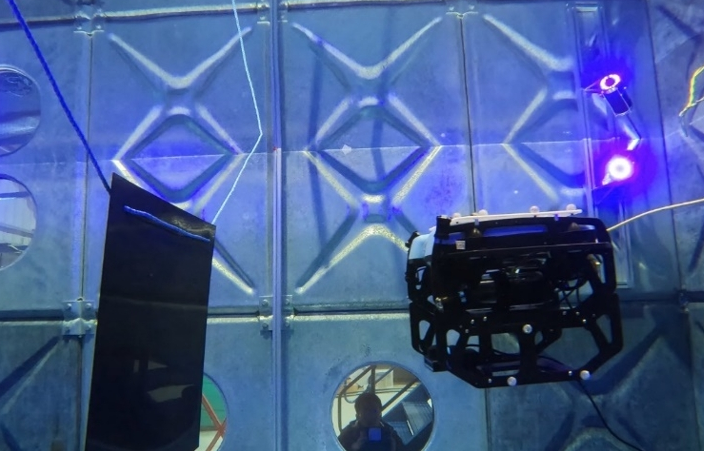
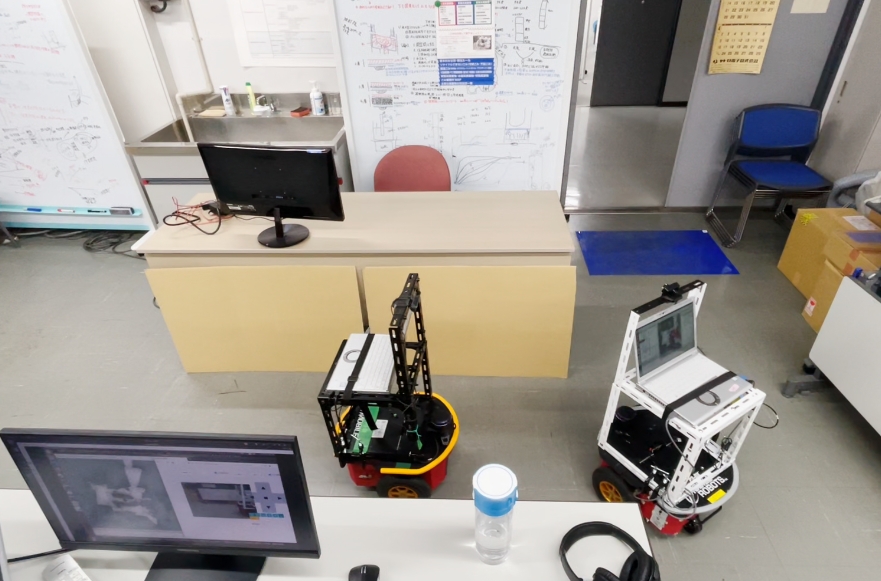
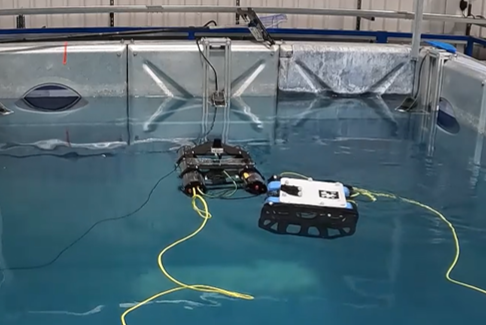
TeleAqua Development of TeleAqua Series — a new generation of cross-medium robotic platforms. Image-based Multi-agent Formation Developed heterogeneous multi-agent leader-follower formation with image-based visual servoing. Validation conducted on physical platform. Virtual Elastic Tether Development of multi-agent navigation approach for confined aquatic spaces, under limited sensory information. Validation includes full Gazebo simulation and physical implementation. Cooperative Obstacle Avoidance Development of fully distributed multi-agent obstacle avoidance approach utilising camera, LiDAR, and imaging sonar. Validation includes full Gazebo simulation and targeting physical implementation. Digital twin platform for cyber–physical robot fleets SARESE x RNE Research Sprint 2022. Key words, digital twin, teleoperation, multi-robot fleet. Patrol and Priority Control Development of autonomous patrolling and priority control algorithm. Robots navigate with TEB planner and RSNP server, object detection achieved by YOLO, robots communicate with each other via MQTT protocol. Wireless Underwater Communication Project that aims to enable wireless operating of underwater robots. Key words, TCP/UDP, teleoperation, optical communication. Anomaly Detection Mission-level encoder-decoder for anomaly detection.