Kanzhong Yao
Build a Real World

Engineering building A
Manchester
UK
I’m Kanzhong Yao, a PhD graduate from the Robotics for Extreme Environments Group at University of Manchester. My doctoral research was supervised by Dr. Simon Watson and Dr. Ognjen Marjanovic. I hold a Bachelor’s degree in Vehicle Engineering and a Master’s degree in Aerospace Engineering. Currently, my work focuses on robotics, with a particular interest in multi-robot collaboration in extreme environments. I’m also a RAICo Junior Fellow at RAICo1.
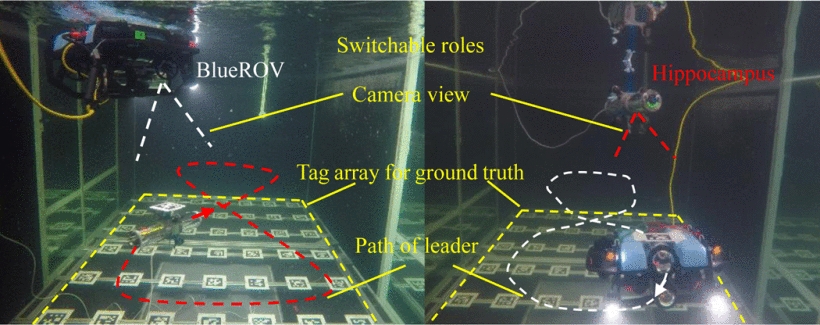
I have experience working on various robotic platforms. In 2022, I completed a secondment at Hamburg University of Technology, working with the HippoCampus robot under the support of UK Turing Scheme. In 2024,I was also awarded as NEST Fellow by the University of Tokyo and Japan Atomic Energy Agency (JAEA) for the development on multiple robot platform for radiation mapping and teleoperation at Yamashita lab, University of Tokyo, working with Pioneer 3-DX ground robots. Apart from that, I’ve also worked with BlueROV2, MallARD, DJI Tello (UAV), El- MallARD (land version of MallARD), Jackal.
Research Statement
I am interested in developing robots for real-world applications, particularly in challenging environments. In such environments, where sensor measurements can become unreliable, utilizing multiple robots can offer superior performance. Much of my previous work has aimed to achieve a similar level of autonomy as in standard environments but with reduced sensory information.
News
| Mar 24, 2025 | I’ve started my new role as a researcher in the Embodied AI team at the Institute of Artificial Intelligence (TeleAI), China Telecom, specializing in underwater robotics.Our team is always on the lookout for passionate research interns from around the world. If you’re excited about developing cool robots with us, feel free to drop me an email. |
|---|---|
| Sep 24, 2024 | Our research image submitted to Manchester Research Image Competition won the second prize! |